Ground-Truth Test Environment via Multi-Object Tracking for Autonomous Agricultural Robots
Mobile multi-sensor test field environment with multi-object tracking pipeline for system-level evaluation of autonomous agricultural robots.
Authors: Daniel Barrelmeyer, Jannik Jose, Stefan Stiene
Published: 9 March 2026
Overview
Autonomous agricultural robots are increasingly deployed in real farming environments. These systems operate in complex and dynamic outdoor settings where they must interact safely with humans, animals, and other machines. Ensuring the reliability and the correct behavior of such systems requires validation under realistic field conditions. Existing validation approaches often rely on stationary test infrastructures, focus primarily on sub-system levels like individual sensors, or are limited to single-object scenarios.
Our research addresses this issue by developing a testing setup that can be used in a wide
range of settings.
The setup
- is mobile and self-sufficient (independent of fixed energy supply or communication infrastructure)
- enables independent detection of the position, orientation and extent of objects
- enables simultaneous detection of multiple dynamic objects
- is capable of monitoring agricultural areas of realistic size
- enables georeferencing of information
- supports use cases such as geofencing and environmental perception
- is able to treat objects as black boxes (without information exchange)
Mobile Sensor Stations
The setup is based on at least three sensor stations. Each sensor station is equipped with a high-resolution 3D LiDAR sensor, a GNSS receiver for time synchronization and georeferencing, and an edge computing unit for data acquisition. The stations are mounted on portable tripods and powered by autonomous battery systems, enabling flexible deployment without additional infrastructure.
By distributing several sensor stations around the area of interest, the environment can be observed from multiple viewpoints. This configuration reduces occlusions and allows the system to capture dynamic objects over large field areas.
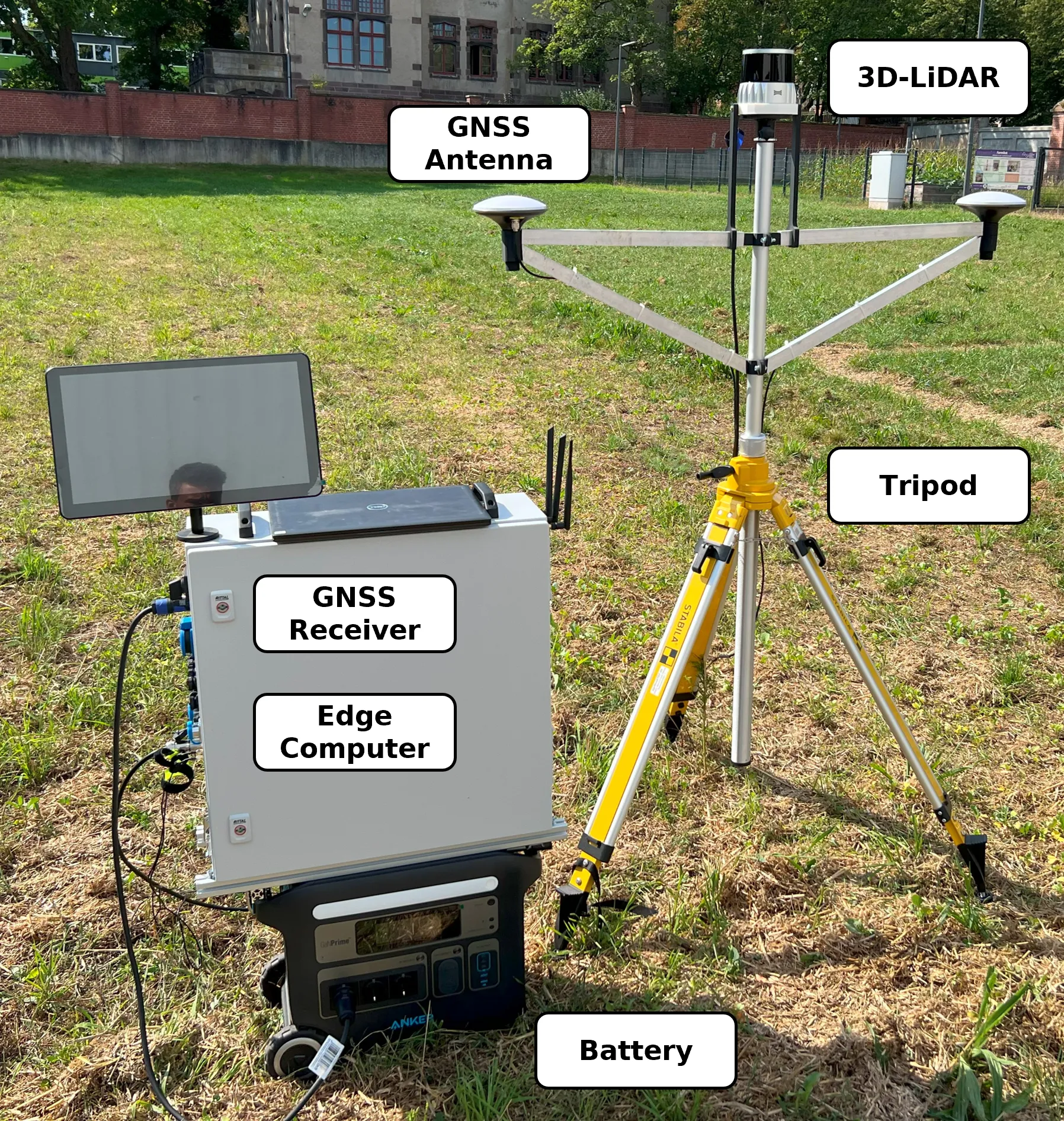 Figure 1: Picture of one assembled sensor station.
Figure 1: Picture of one assembled sensor station.
| Component | Model | Manufacturer |
|---|---|---|
| 3D LiDAR | OS2-128 | Ouster, Inc. (San Francisco, USA) |
| GNSS Receiver | simpleRTK3B (mosaic-H) | ArduSimple / Septentrio |
| GNSS Antenna (2×) | AS-ANT2B-CAL-L1L2-15SMA | ArduSimple |
| Battery | PowerHouse 767 | Anker Innovations |
| Tripod | BST-K-L | STABILA Messgeräte Gustav Ullrich GmbH |
| Edge Computer | NRU-220S-JAO64G (Jetson AGX Orin) | Neousys Technology / NVIDIA |
Table 1: Hardware components of a sensor station.
Multi-Object Tracking Pipeline
The software pipeline of the framework focuses on transforming raw measurements from multiple mobile sensor stations into georeferenced object trajectories that can serve as ground truth for field experiments. The pipeline takes synchronized 3D LiDAR and GNSS data as input and produces detections and temporally consistent tracks of dynamic objects such as agricultural robots or humans. In this way, the system provides an external and explainable reference for evaluating navigation, geofencing, and environmental perception functions of autonomous agricultural robots.
 Figure 2: Scheme (high-level) of multi object tracking workflow
Figure 2: Scheme (high-level) of multi object tracking workflow
Data Acquisition
The data acquisition is performed by several mobile sensor stations positioned around the area of interest. Each station combines a high-resolution 3D LiDAR sensor with GNSS-based time synchronization and georeferencing, while an edge computer records the measurement streams locally as rosbags in the mcap file format.
 Figure 3: A simplified scheme of data acquisition, including sensor positioning, recording, and satellite communication for timestamping.
Figure 3: A simplified scheme of data acquisition, including sensor positioning, recording, and satellite communication for timestamping.
Data Fusion
After acquisition, the measurements of the individual sensor stations are synchronized in time and aligned in space to form a common point cloud representation of the scene. GNSS-based timestamps provide a shared temporal reference, while registration methods combine the LiDAR scans into a consistent global frame. This fusion step is essential because it expands the observable area, improves the spatial impression of objects, and reduces blind spots that would occur when relying on a single station only.
 Figure 4: Individual point clouds captured by three sensors (green, orange, and red), and their
combined (fused) point cloud, which is subsequently used for the detection.
Figure 4: Individual point clouds captured by three sensors (green, orange, and red), and their
combined (fused) point cloud, which is subsequently used for the detection.
Object Detection
Object detection begins with the separation of dynamic objects from the static environment. For this purpose, a reference scan of the scene without moving objects is used to identify structures that remain unchanged over time. In addition, region-of-interest constraints and dedicated filtering steps remove irrelevant measurements and reduce the amount of data that has to be processed in later stages.
 Figure 5: Ground filter applied to an example point cloud with two
people and an agricultural robot.
Figure 5: Ground filter applied to an example point cloud with two
people and an agricultural robot.
A dedicated ground-filtering stage is applied to suppress terrain points and retain only measurements that are likely to belong to relevant objects. Since agricultural environments often contain uneven terrain and sparse vegetation, robust geometric filtering is required before segmentation can be performed reliably. The remaining points are subsequently grouped into object candidates using density-based clustering methods.
 Figure 6: Result of clustering a multi-object scene.
Figure 6: Result of clustering a multi-object scene.
For each resulting cluster, geometric object properties are estimated in the form of three-dimensional bounding boxes. These bounding boxes describe the position, orientation, and spatial extent of the object and thus provide the measurement input for the tracking stage. The detection module is deliberately based on interpretable geometric processing rather than end-to-end learning, making the resulting ground truth easier to analyze and validate.
![]() Figure 7: Visualisation of fused 3D point cloud data with an oriented bounding box highlighting the
detected robot. The left image shows colour-coded data points from multiple sensors, while the right
image displays a monochrome version of the same data for clarity.
Figure 7: Visualisation of fused 3D point cloud data with an oriented bounding box highlighting the
detected robot. The left image shows colour-coded data points from multiple sensors, while the right
image displays a monochrome version of the same data for clarity.
Multi Object Tracking
The tracking stage links object detections across time and estimates temporally consistent trajectories for all visible objects. The system follows a tracking-by-detection paradigm in which the bounding boxes extracted from the fused point clouds are used as detections for a probabilistic multi-object tracker. Motion prediction, data association, state update, and track management are combined to maintain stable identities even in challenging situations such as temporary occlusions, close interactions, or missed detections. This allows the system to generate robust trajectories that can be used as quantitative ground truth for validating autonomous agricultural robots in dynamic field scenarios.
![]() Figure 8: Architecture of the multi-object tracker.
Figure 8: Architecture of the multi-object tracker.
Example Use Cases
 Figure 9: Visualisation of example use cases (geofencing, trajectory tracking and environment perception).
Figure 9: Visualisation of example use cases (geofencing, trajectory tracking and environment perception).
Geofencing
Autonomous agricultural robots must respect predefined safety zones during operation. The developed ground-truth system enables the validation of geofencing functionality by providing precise trajectories of the robot within the test environment. By comparing the ground-truth trajectory with the defined geofence boundaries, it becomes possible to determine whether the robot correctly detects and reacts to boundary violations. This allows researchers to evaluate both the timing and spatial accuracy of safety-related system responses under realistic field conditions.
Trajectory Tracking
The tracking system can also be used to evaluate the navigation performance of autonomous robots. By reconstructing the ground-truth trajectory of the robot from the fused LiDAR observations, the system provides an independent reference for assessing localization and path-following accuracy. The resulting trajectories can be compared with the navigation data reported by the robot itself, allowing deviations and systematic localization errors to be identified. This makes it possible to quantitatively analyze navigation performance in large outdoor environments.
Environment Perception
Another important application of the test environment is the evaluation of human–robot (or other dynamic objects) interaction scenarios. In agricultural fields, robots must operate safely in the presence of human workers. By tracking both the robot and human participants simultaneously, the system can reconstruct their relative motion and spatial relationships over time. This allows safety-related behaviors such as obstacle avoidance, safe stopping distances, and reaction times to be analyzed in dynamic multi-object situations.
Field Tests and Datasets
Some field trials and results are described in (Barrelmeyer et al., 2025). Datasets are available upon request.
More information is coming soon.
Research Contributions
This research topic provides:
- mobile ground-truth infrastructure for field robotics
- multi-object tracking for agricultural environments
Current and Future Work
- accuracy validation with robotic total station (laser tracker)
- benchmark datasets for environment perception tasks of agricultural robots
Publications
Mobile Ground-Truth 3D Detection Environment for Agricultural Robot Field Testing
Barrelmeyer, D., Stiene, S., Jose, J., Porrmann, M.
Sensors, 2025
Environment for Testing Agricultural Robots in the Field with Ground Truth 3D Object Tracking
Barrelmeyer, D., Jose, J., Stiene, S.
VDI LAND.TECHNIK AgEng Conference, 2025
Collaboration
If you are interested in collaboration, please contact
- Stefan Stiene - s.stiene@hs-osnabrueck.de
- Daniel Barrelmeyer - daniel.barrelmeyer@hs-osnabrueck.de
- Jannik Jose - jannik.jose@hs-osnabrueck.de
Acknowledgments and Funding
This research was supported by the research project “agrifoodTEF-DE” (funding program Digitalisierung in der Landwirtschaft, grant number 28DZI04A23) funded by the Federal Ministry of Agriculture, Food and Regional Identity (BMLEH) based on a decision of the Parliament of the Federal Republic of Germany via the Federal Office for Agriculture and Food (BLE).
![]()