11 Mar 2026
Malte Hagedorn, Malte Klöpping
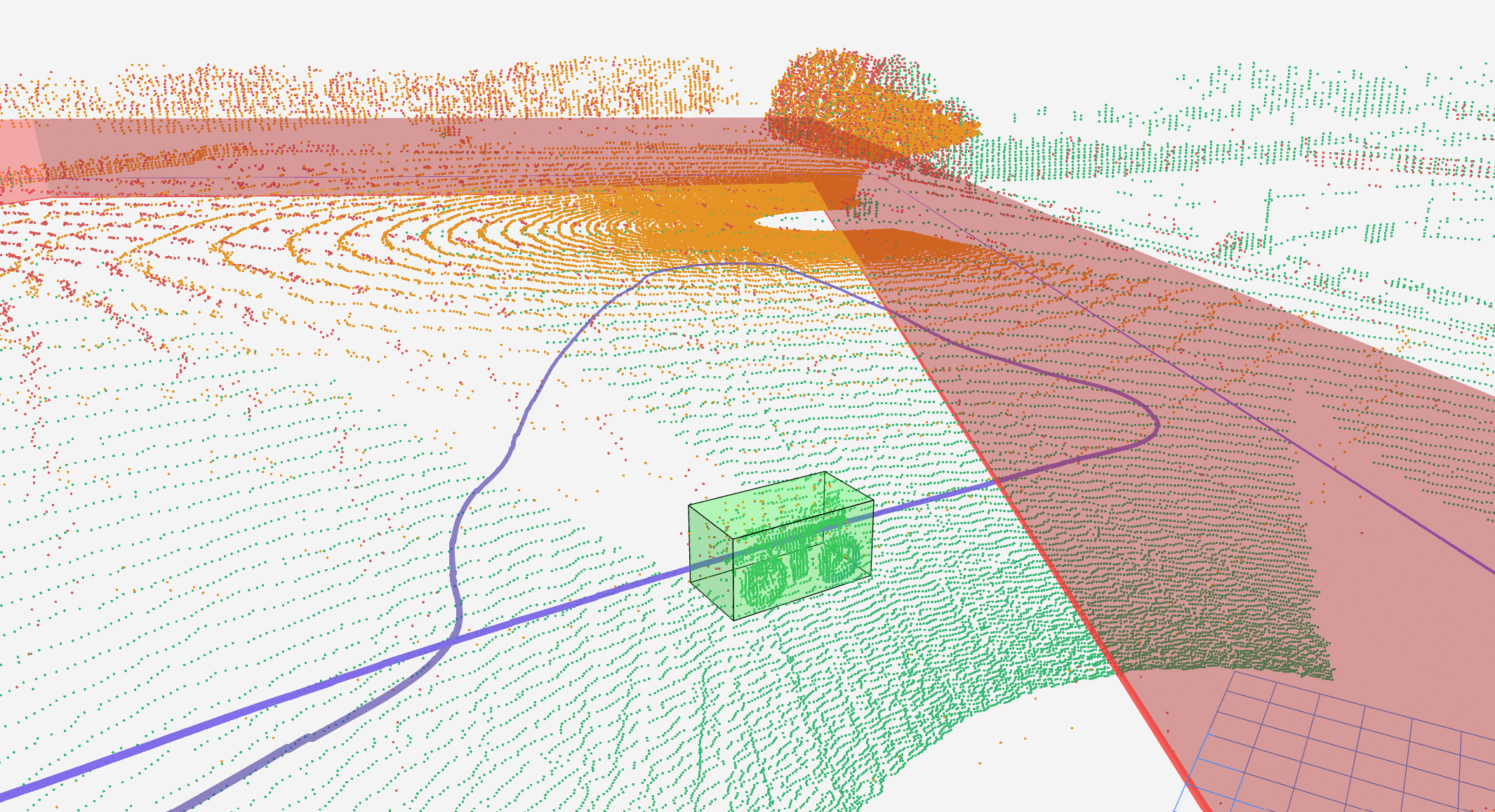
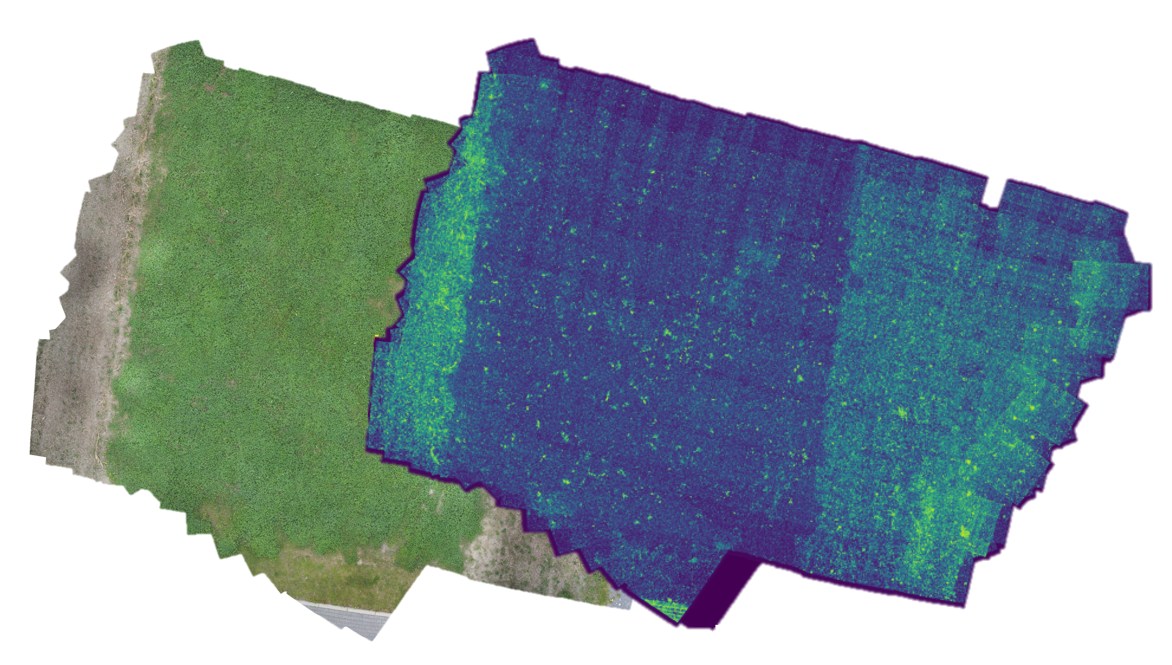
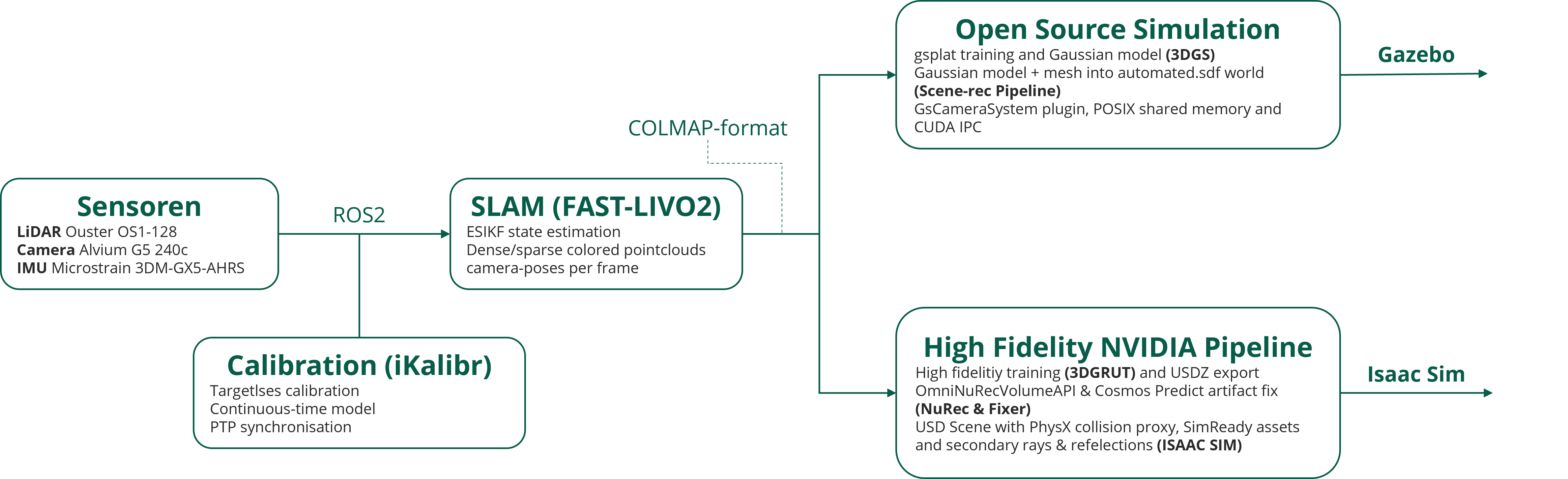
Fusion of LiDAR-Inertial-Visual SLAM and 3D Gaussian Splatting for Synthetic Scene Generation in Robotic Simulation Environments
Development of a pipeline that combines LiDAR-Inertial-Visual SLAM tightly coupled odometry with 3D Gaussian Splatting to generate photorealistic, simulation-ready synthetic environments for AI/ML applications in smart robotics.